3D重构
3D重构设置包含以下的几种设置:
过曝滤除
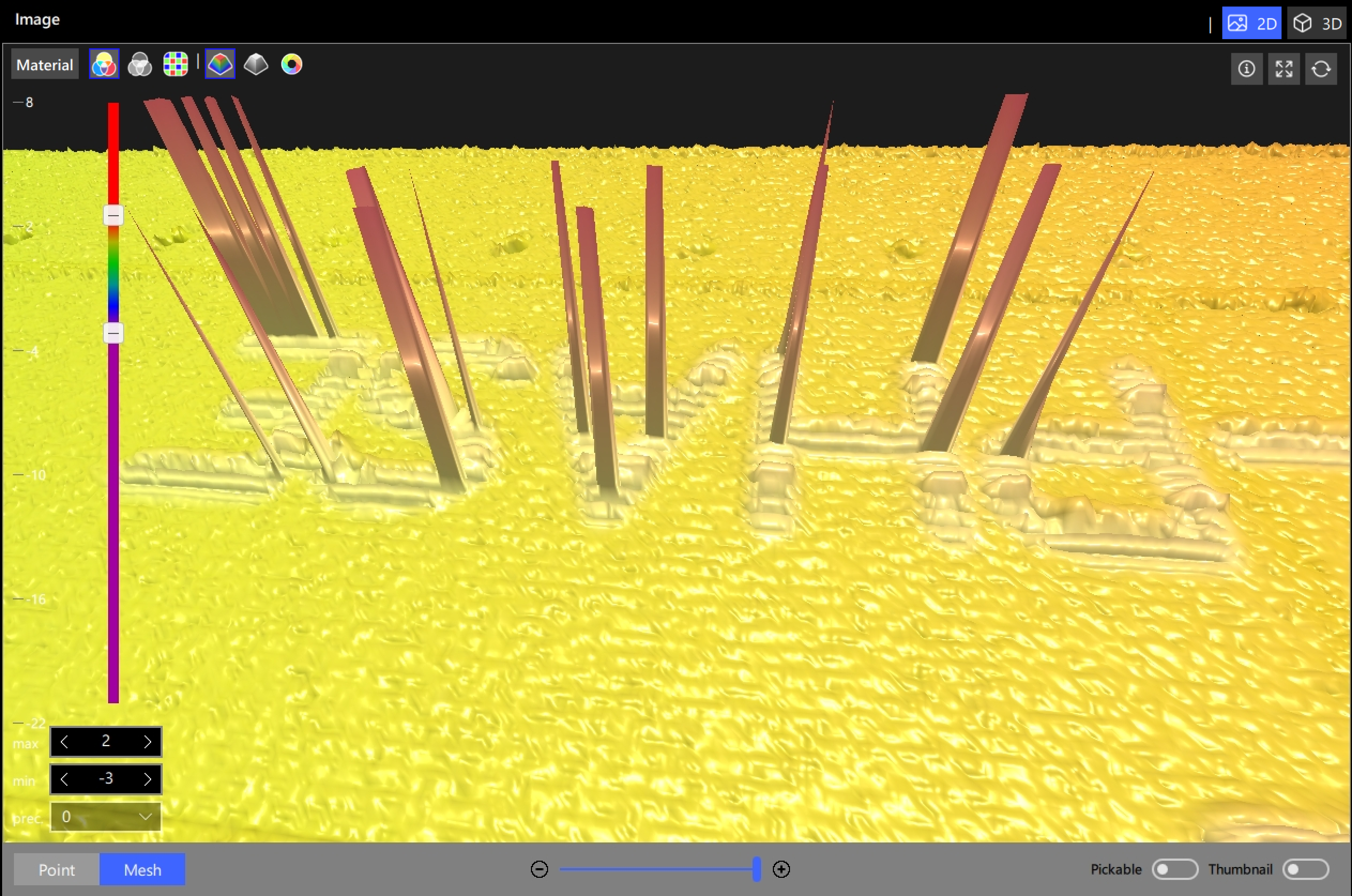
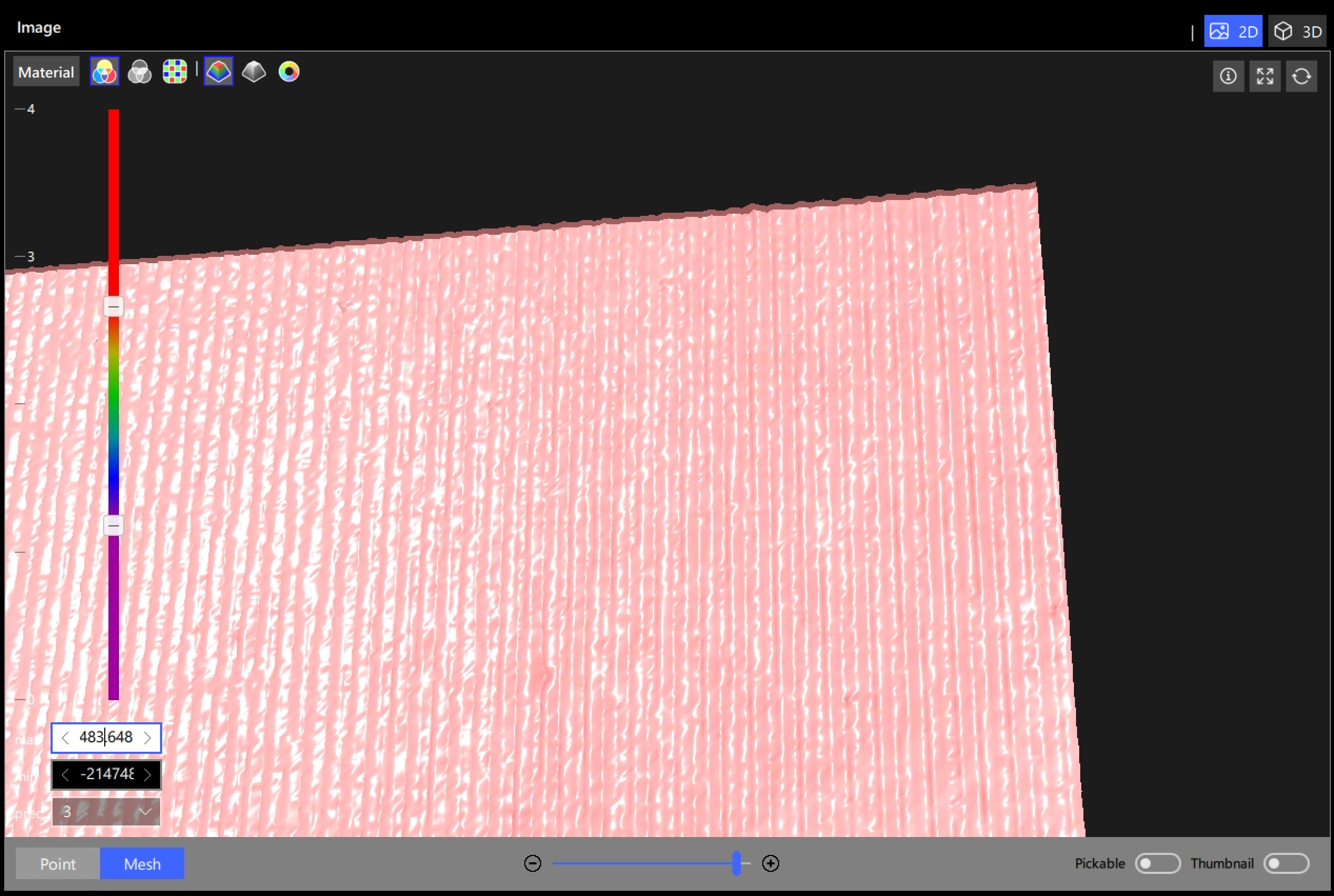
过曝导致的成像结果如图1:
 |  |
|---|
如上图所示,左图呈现极其严重过曝导致的飞点,右图有波浪状误差。
这是由于移相法3D重构技术依赖于一系列2D图像,若这些2D图像的某些像素发生了过曝,依据过曝程度的不同,可能导致3D重构产生彻底错误的结果(飞点),也有可能只是产生误差略大的结果,也有可能不产生任何可观测到的影响。
过曝滤除设置界面如图2:
![]()
可设置两种过曝滤除模式,如图3:

当选择Custom模式时可手动设置过曝滤除阈值,如图4:

自动模式时,设备根据不同的3D工作模式,自动设置过曝滤除阈值。
过曝滤除阈值决定如何判断一个像素点是否应该因为2D原图过曝而被标记为不可重构的像素点:阈值为0时,允许任何程度的过曝,即允许任何过曝点,将导致过曝飞点增加。除非追求绝佳的单次曝光成像完整性,且毫不介意飞点数量,否则不建议使用这种方式。
阈值处于1~15时,允许一定程度的过曝,值越大,剔除越多过曝点。阈值为16时,不允许任何程度的过曝,即剔除所有过曝点,它可以确保一切因过曝导致的问题点都被滤除,但也会滤除一些轻微过曝并未对结果产生影响的点,这种方式的成像完整性相对较差。
需要注意的是,过曝严重程度与其对重构结果的影响的关系并不是一成不变的。对于不同的3D工作模式和不同的被测物,可能会出现在某些情况下过曝滤除阈值的设置可以剔除所有带有显著误差的点,而有些情况下却不可以。
若过曝滤除阈值设置得不够严格,HDR模式的结果将带有显著的飞点或误差。在HDR融合算法中,总是取曝光强度最大且重构成功的那一次曝光的重构结果作为输出数据。在HDR中,若最大曝光强度的拍摄产生了导致严重错误的过曝,且没有通过合适的过曝滤除阈值设置滤除,它必将会作��为HDR融合结果输出。
因此建议在HDR模式下,适当加严(增大)过曝滤除阈值,使得曝光强度最大且过曝的点被标记为过曝,HDR融合输出低曝光强度且未过曝的正确结果。
有效点判断
有效点判断的设置界面如图5:
![]()
有效点判断有四种模式可供选择,如图6:

其中Weak, Normal, Strong包含三组预设参数
选择Custom模式可以手动设置参数, 参数界面如图7:
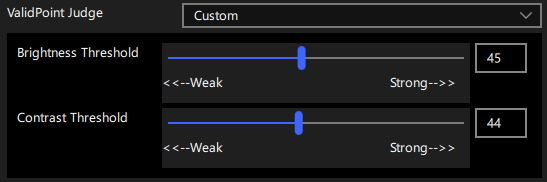
可设置的参数分为两种:
-
亮度阈值
(软件默认预设值: Weak-1, Normal-3, Strong-6)
-
对比度阈值
(软件默认预设值: Weak-1, Normal-3, Strong-6)
阈值越小,判定条件越为宽松。应当先将所有参数设置为0(最宽松) ,然后逐一增大至能够剔除最多飞点但不剔除正常点的值(顺序任意)。
飞点剔除
飞点剔除的设置界面如图8:
![]()
与有效点判断一样,包含Weak, Normal, Strong包含三组预设参数
选择Custom模式可以手动设置参数, 参数界面如图9:
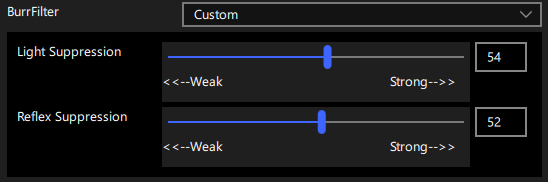
可设置的参数分为两种:
-
环境光抑制(Light Suppression)
(软件默认预设值: Weak-6, Normal-13, Strong-26)
-
反射抑制(Reflex Suppression)
(软件默认预设值: Weak-6, Normal-13, Strong-26)
与有效点判断阈值相同,阈值越小,判定条件越宽松。
有效点判断和飞点剔除是通过一定算法来判断一个点是否是飞点的。尽管这4个参数在名称和原理上不同,但其作用是相同的,即把点云中除过曝以外的问题点标记出来,增大有效点阈值来剔除更多的重复精度较低的点。