3D Reconstruction
The 3D reconstruction settings include the following configurations:
Overexposure Removal
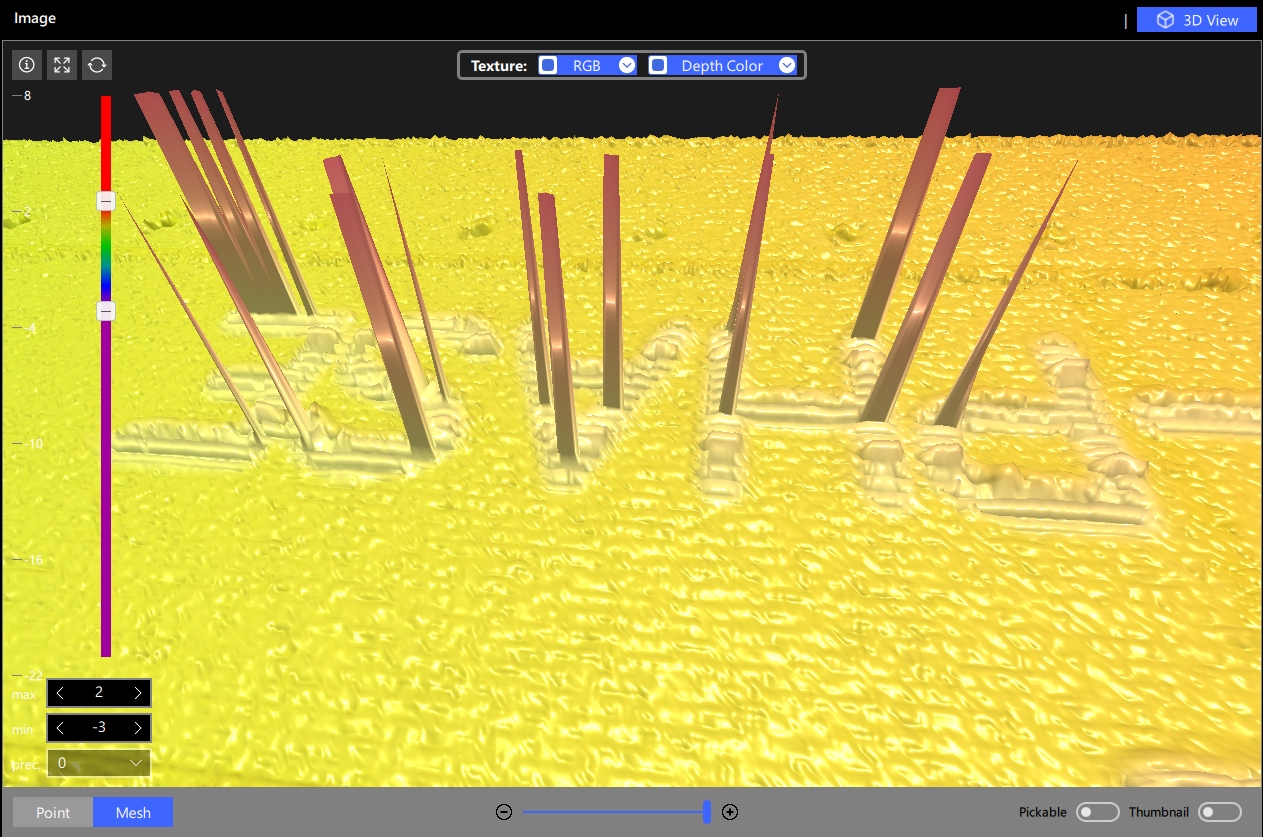
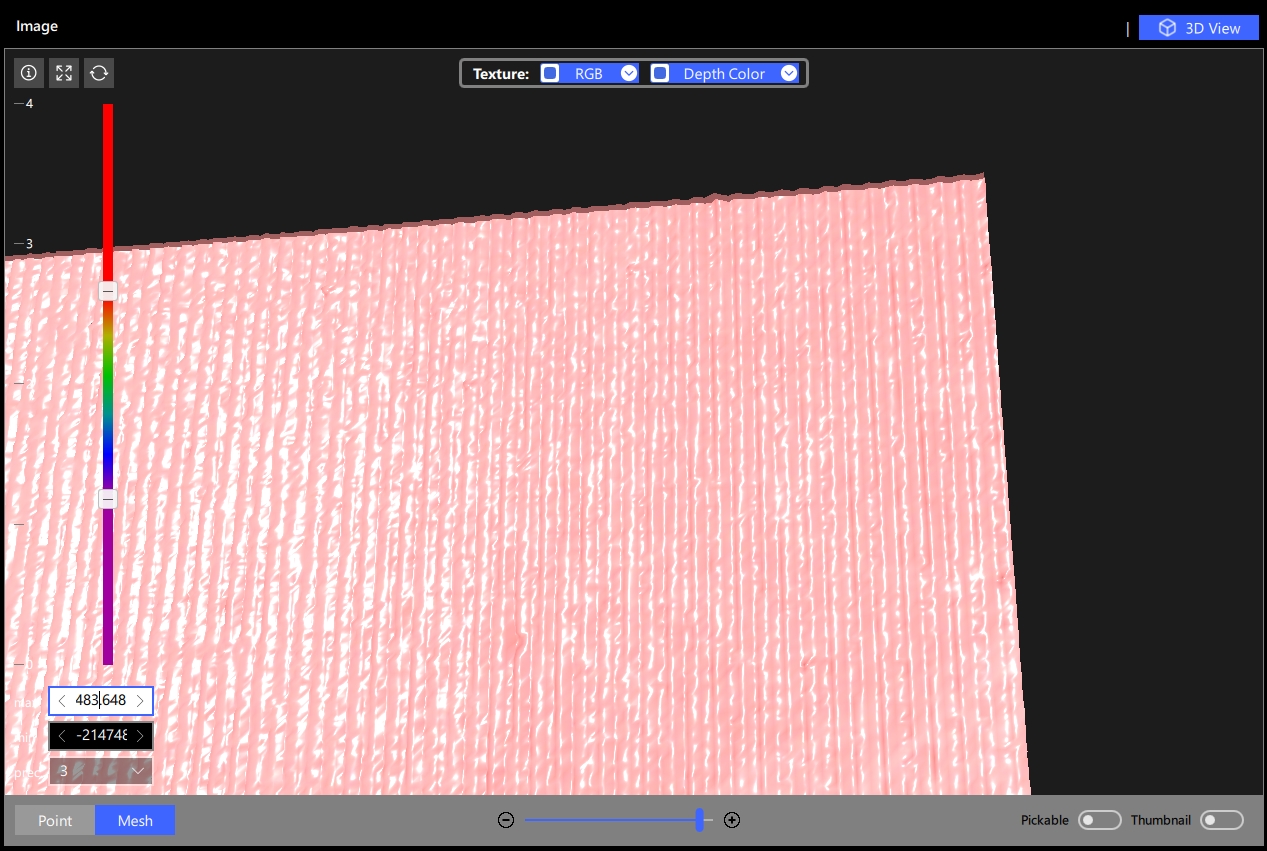
The imaging results caused by overexposure are shown in Figure 1:
 |  |
|---|
As shown above, the left image displays severe overexposure leading to outliers, while the right image has wave-like errors.
This occurs because the phase-shifting method in 3D reconstruction relies on a series of 2D images. If some pixels in these 2D images are overexposed, depending on the degree of overexposure, it may result in completely erroneous 3D reconstruction (outliers), or it may only produce results with slightly larger errors, or it may not produce any observable effects.
The overexposure filter settings interface is shown in Figure 2:
![]()
Two overexposure filter modes can be set, as shown in Figure 3:

When the Custom mode is selected, you can manually set the overexposure filter threshold, as shown in Figure 4:

In Automatic mode, the device sets the overexposure filter threshold automatically based on different 3D operating modes.
The overexposure filter threshold determines how to judge whether a pixel should be marked as non-reconstructable due to overexposure in the 2D original image: a threshold of 0 allows any degree of overexposure, thus increasing the number of overexposure outliers. Unless absolute image completeness is pursued with no concern for the number of outliers, this method is not recommended.
When the threshold is between 1 and 15, a certain degree of overexposure is allowed, the higher the value, the more overexposure points are removed. At a threshold of 16, no degree of overexposure is allowed, i.e., all overexposure points are removed, ensuring that all points caused by overexposure are filtered out, but it may also filter out some slightly overexposed points that do not affect the results, which relatively degrades imaging completeness.
It should be noted that the relationship between the severity of overexposure and its impact on the reconstruction results is not constant. For different 3D operating modes and different test objects, there may be cases where the overexposure removal threshold settings can eliminate all points with significant errors, while in other cases it may not.
If the overexposure filter threshold is not set strictly enough, the results in HDR mode will have significant outliers or errors. In the HDR fusion algorithm, the reconstruction result from the exposure with the highest intensity that successfully reconstructs is always taken as the output data. In HDR, if the maximum exposure intensity results in severe overexposure errors and is not filtered out by appropriate overexposure filter threshold settings, it will be output as the result of HDR fusion.
Therefore, it is recommended to increase (tighten) the overexposure filter threshold in HDR mode, so that points with the highest exposure intensity and overexposure are marked as overexposed, and HDR fusion outputs the correct results with lower exposure intensity and without overexposure.
Valid Point Judge
The valid point judge settings interface is shown in Figure 5:
![]()
There are four modes to choose from for valid point judge, as shown in Figure 6:

The modes Weak, Normal, Strong include three sets of preset parameters.
Choosing the Custom mode allows manual parameter setting, the interface for which is shown in Figure 7:
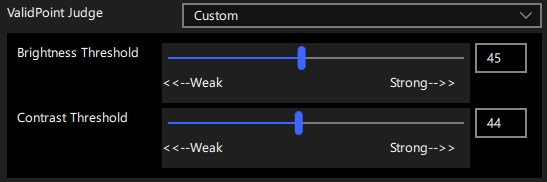
The parameters that can be set are of two types:
-
Brightness threshold
(Software default presets: Weak-1, Normal-3, Strong-6)
-
Contrast threshold
(Software default presets: Weak-1, Normal-3, Strong-6)
The smaller the threshold, the more lenient the criteria. All parameters should initially be set to 0 (most lenient), and then gradually increased to the value that eliminates the most outliers without removing normal points (order is arbitrary).
Burr Filter
The burr filter settings interface is shown in Figure 8:
![]()
Like valid point judge, Weak, Normal, Strong include three sets of preset parameters.
Choosing the Custom mode allows manual parameter setting, the interface for which is shown in Figure 9:
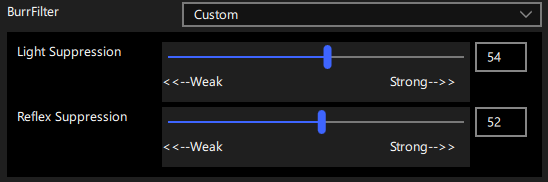
The parameters that can be set are of two types:
-
Light Suppression
(Software default presets: Weak-6, Normal-13, Strong-26)
-
Reflex Suppression
(Software default presets: Weak-6, Normal-13, Strong-26)
As with valid point judge thresholds, the smaller the threshold, the more lenient the criteria.
Valid point judge and burr filter are determined through certain algorithms whether a point is an outlier. Although these four parameters have different names and principles, their effect is the same, which is to mark problematic points in the point cloud other than those caused by overexposure, increasing the valid point threshold to eliminate more points with lower repeatability precision.